Task state, progress, and error reporting
What is a task, anyway?
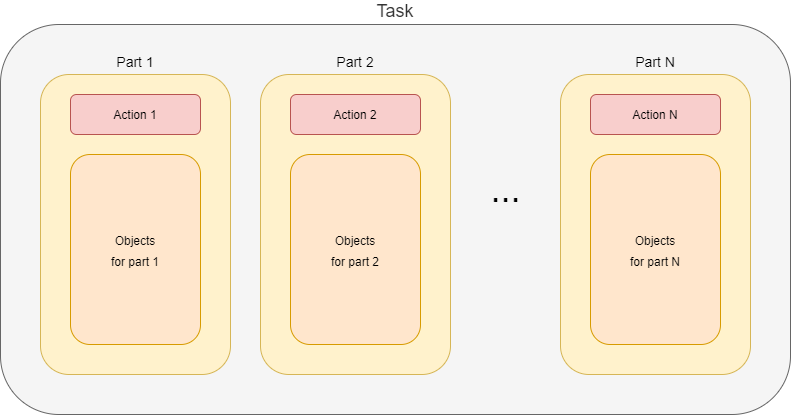
A task is a set of actions that have to be executed on sets of objects. A combination of an action and its object set is called task part.[1] [2]
Usually, a task consists of a single such action. Examples are recomputation (of users), import (of accounts), or perhaps deletion (of repository objects).
However, some tasks contain more actions. A typical case is the reconciliation task. It does the following:
-
First, it executes pending operations. So, the object set for this action is all shadows on a given resource with given object class that have pending operations.
-
Then, it reads resource objects and synchronizes them with respective focal objects. The object set is all objects on a given resource with given object class.
-
Finally, remaining shadows are refreshed. The object set is all shadows on a given resource with given object class that were not synchronized since this task started.
There are other possible reasons for dividing a task into parts. For example, the validity scanner operates on objects and their assignments whose validity boundary ("valid from" or "valid to") is in the specified time interval. Because the database query that covers both objects and their assignments takes too much time to evaluate (at least on some databases), validity scanner task can have two parts: the first looks after validity of the objects, and the second treats the validity of objects' assignments.
Another example of task parts is use of task thresholds. Shortly speaking, thresholds allow us to specify limit on defined operations, such as creation or deletion of a user or account, modification of specified properties, and so on. Thresholds can be used either with "do, then think" or "think, then do" approach. The former means that the respective task is run, and after a specified threshold (number of watched operations) is reached, the execution is stopped. The effects of operations carried out until that point are permanent. But the latter approach divides the task into two parts: simulation and execution. The first part does not execute anything, just simulates the operations and watches the thresholds. If none of them is reached, the second part (i.e. the actual execution) is run. Otherwise, the task stops after the first part, without executing anything.
Task parts and task objects
The part is a logical concept. It describes what has to be done, and how.
In running system, what we observe are task objects: instances of TaskType stored in
the repository. How are parts mapped to the task objects? There are the following options:
-
Each part is executed in its own task object.
-
All parts are executed within the same task object.
The former looks like this:
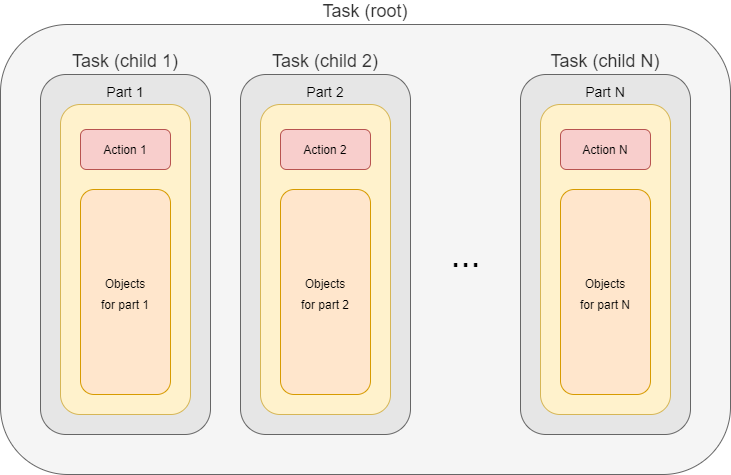
There is a root task object that holds information about the whole task, for example the description of individual parts. It does not execute anything on its own: it just waits until all parts are done.
Parts are executed in context of separate subtasks. They contain everything that is needed, e.g. action and options specification, object set delineation, and so on. Each task can have its own worker subtasks (see below). Everything is well-organized and clean, at the cost of creating additional task objects.
The latter model, i.e. having single task object, looks like this:
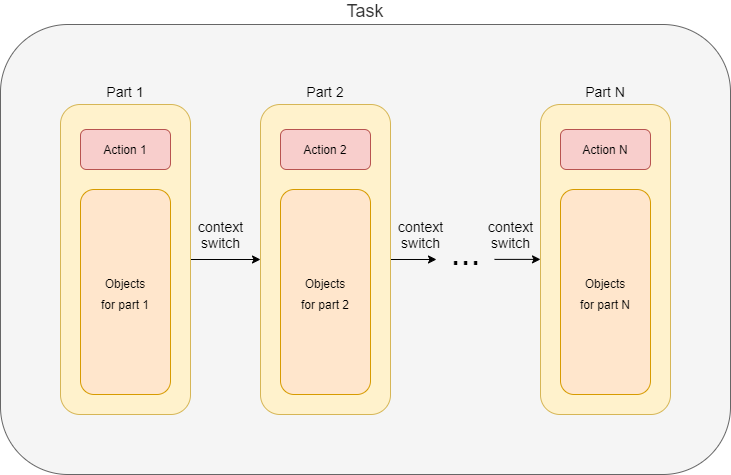
Here we have only a single task object that encapsulates the whole processing. Those elements of configuration and task state that are specific for individual parts are "switched" in the task object when the processing proceeds from a part to the following one. This fact is denoted as "context switch" in the figure above.
This model is suitable for smaller tasks, namely in situations where there are no separate worker tasks present.
Buckets
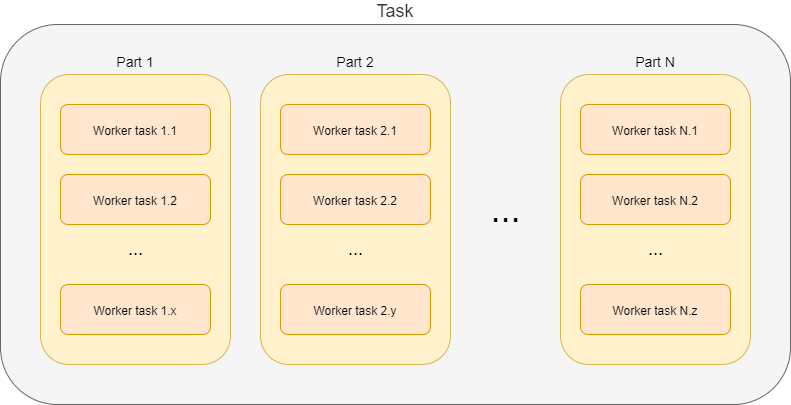
Sets of objects that are to be processed in individual parts can be internally structured into buckets. A bucket is the basic unit of work. The task knows which buckets were processed and therefore it is able to be stopped and later restarted, continuing processing at the point of the first unprocessed bucket. Moreover, individual buckets can be processed in parallel by worker subtasks (see later).
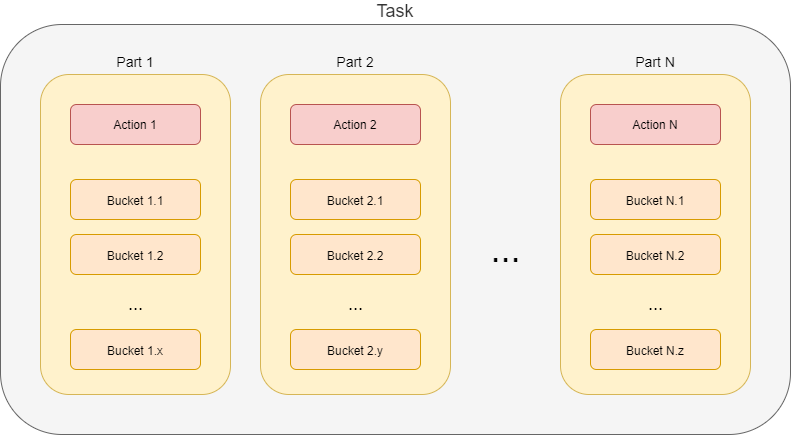
The set of objects for part 1 is divided into x buckets (Bucket 1.1 to Bucket 1.x). Objects for part 2, which may or may not be the same as objects for part 1, are divided into y buckets (Bucket 2.1 to Bucket 2.y). Even if the object sets are the same, division into buckets can be different. Similarly, the buckets be created for remaining parts.
Worker tasks and worker threads
How are the actions executed? First, individual parts are usually executed sequentially. [3] The execution of individual parts takes place within so-called worker tasks. In the picture below, there are x worker tasks for part 1, y worker tasks for part 2, and z worker tasks for part N.
Note that there may or may not be per-part task objects, as described above. We do not show them in the figure to keep things simple.
The worker tasks operate on individual buckets. It means that they try to obtain available buckets, i.e. buckets that are not completed nor allocated to another worker task.
In the following picture we see two worker tasks that have to process 1000 buckets.
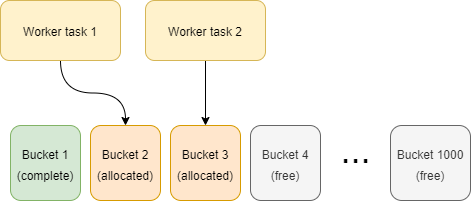
Bucket 1 is already done (by either worker 1 or worker 2), bucket 2 is being processed by worker task 1, bucket 3 is being processed by worker task 2, and the other buckets are waiting to be processed.
Threads
Each worker task contains one or more threads that do the actual work.
The simplest situation is that there is a single thread for the task. The thread then does everything: issues a query to obtain objects in the given bucket (either from the repository or from a resource), receives the objects, and processes them one after another.
This works well, but often does not provide adequate performance. Therefore, the processing within a worker task can be multi-threaded: there is a coordinator thread that issues a query and receives the objects, and there are worker threads that executes specified action on individual objects.
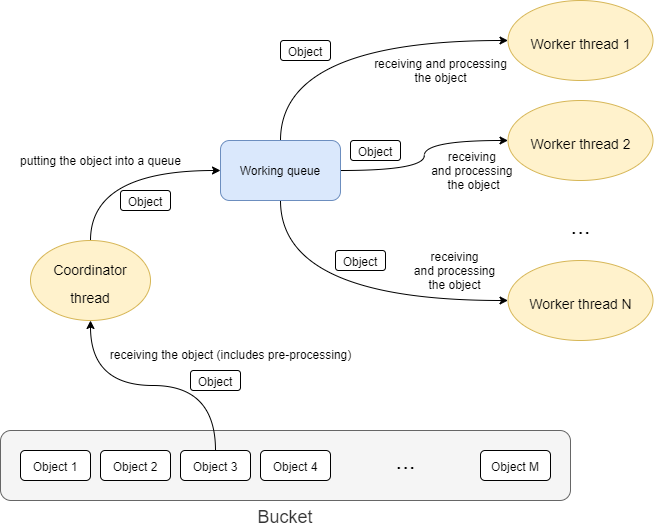
These threads are bound together by an in-memory queue where the coordinator places objects after retrieving and pre-processing them, and from where individual worker threads take the objects for definite processing.
The overall picture then looks like this:
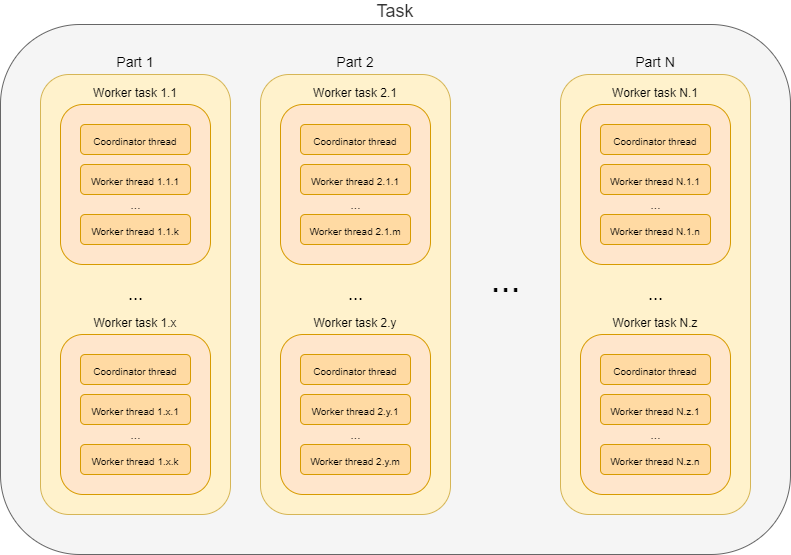
In summary, a task has the following hierarchy:
-
parts
-
worker tasks
-
worker threads
-
-
Each level in this hierarchy can be "a singleton", e.g. there can be tasks that have:
-
single part,
-
single worker task (usually the same as part-containing task or the root task),
-
worker task with a single thread,
in all possible combinations.
Non-standard tasks
The usual case for tasks is that there is a defined set of accessible objects. These objects
reside either in midPoint repository or on a resource. They can be retrieved using searchObjects
or searchObjectIterative call with an appropriate query. They can be usually also counted using
countObjects with the same query.
This also means that these objects can be divided into buckets by adding appropriate clauses to the defining query.
However, there are some tasks that do not match this model: live synchronization and asynchronous updates tasks. Let’s have a look on them.
Live synchronization
Live synchronization task asks a resource for synchronization deltas, i.e. for information on what has been changed since specified time (in most cases since last synchronization). Then it processes the changes retrieved.
The task does not know in advance how many objects to be processed there are. Nor there is a possibility to specify a query for selection a subset of the changes, except for object class name. This means that division into buckets is not available. So there is:
-
typically a single part (but more are possible in case of thresholds, i.e. simulate and execute),
-
a single worker task (it is of no use to create more worker tasks, because there are no buckets to be divided among them),
-
one or more threads within that single worker task.
The division of work among worker threads is a bit more complex than for standard tasks. The reason is that ordinary tasks work with objects, while live synchronization works with changes. The changes can have dependencies. Typically, if (earlier) change A and (later) change B both describe the same object, they must be applied sequentially: first A, then B.[4]
Asynchronous updates
This is even more special task than live synchronization. It does not retrieve changes to be processed. Instead, the changes arrive unpredictably, as they are generated by the resource.
So there cannot be even simulate/execute parts. There is:
-
a single part,
-
a single worker task,[5]
-
one or multiple threads.
The processing is similar to the one in live synchronization, including the need for processing changes in the correct order.
State reporting
Requirements
Task state should be reported in a clear and consistent way.
Current state
The task state is sometimes misleading. Especially for multi-node or multi-part tasks it shows the state of the global task as "waiting", although the task is normally operating.
Global task state
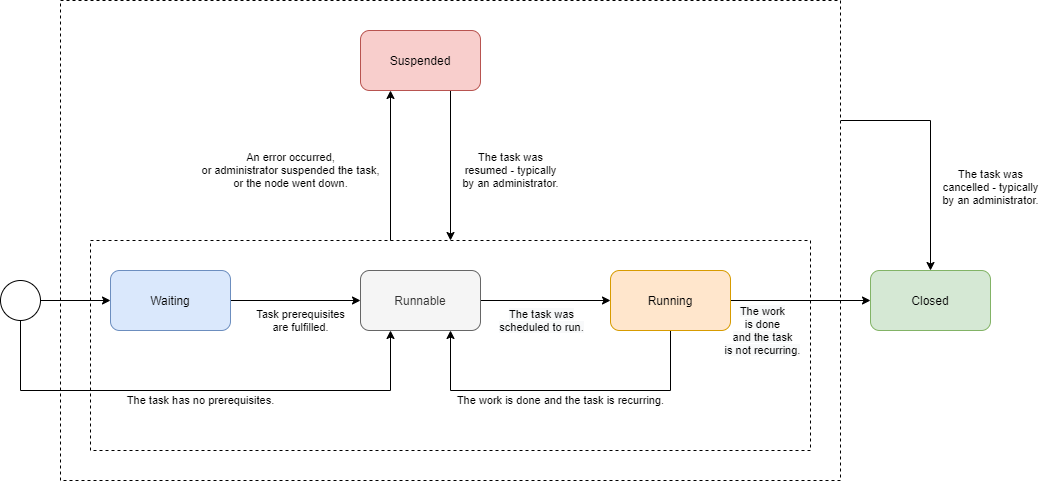
Let’s have a look in which states a task can be. We will describe states of global (conceptual) tasks, not the ones of technical tasks (task objects).
| State | Description | Note |
|---|---|---|
Waiting |
The task is waiting for a prerequisite task. |
In contrast to pre-4.3 model, the waiting state can occur only on the beginning of the task lifecycle. There is also no idea of task waiting for its subtasks (at the conceptual level). |
Runnable |
The task is ready to run. It waits for the scheduled time or for manual scheduling. |
|
Running |
The task is executing, i.e. one or more of its parts are executing. |
|
Closed |
The task is complete. This can occur either when the work is done (for single-run tasks), or when an administrator cancels the task. This is the final state. |
Task cancellation is a new concept. |
Suspended |
Execution of the task was suspended. It can be resumed later. |
See part suspension below. |
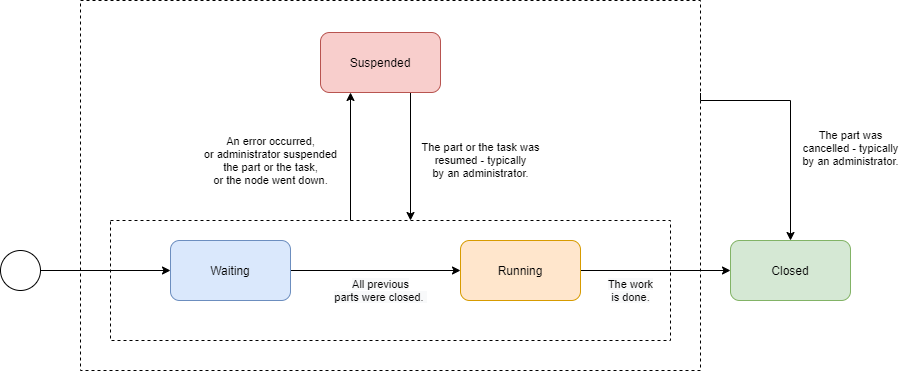
Task part state
The state of any task part can be:
| State | Description |
|---|---|
Waiting |
The part is waiting to be started in the context of current task execution. It waits for the previous (prerequisite) parts to be completed or cancelled. |
Running |
The part is executing, i.e. processing objects. |
Closed |
The part is complete. It processed all of its objects (successfully or not), or it was cancelled by an administrator. It will not resume its execution as part of this task run. This is the final state. |
Suspended |
Execution of this part was suspended. It could happen either because an error occurred, or it was requested by an administrator, or the executor node went down (and automatic restart was not configured). The execution of this part can be resumed later. |
Worker task state
Worker tasks are simple. They start running when the respective part starts, and they work until done, suspended, or cancelled. Note that the suspension or cancellation can occur at any level: the whole task, current part, or individual worker task.
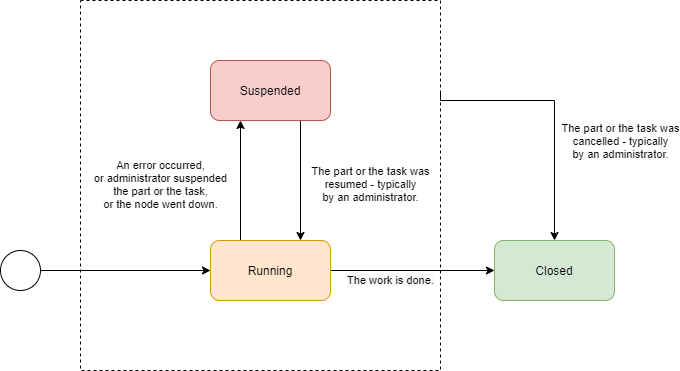
Worker thread state
Finally, worker threads are the simplest. They start running when their owner (a worker task) starts. They stop only in three cases:
-
there is nothing more to do,
-
owning task stops,
-
or there is a fatal error.
(The third case should not occur, as it quietly reduces the number of worker threads, slowing down the worker task progress.)
There is no concept of worker thread suspension or resuming.

Compound state
Standard task lifecycle looks like this:
| Global task | Previous parts | Current part | Next parts | Workers in previous parts | Workers in current part | Workers in next parts |
|---|---|---|---|---|---|---|
waiting or runnable |
not existing |
not existing |
||||
running |
closed |
running |
waiting |
closed |
running |
not existing |
suspended [6] |
closed |
suspended |
waiting |
closed |
suspended |
not existing |
closed |
closed |
closed |
closed |
closed |
closed |
closed |
All parts are created when the global task execution starts. In contrast, worker tasks are created only when the respective part starts. Completed parts and tasks remain in the closed state e.g. to be available for inspection.
If the whole (global) task is suspended, the currently executing part and its workers are suspended as well.
What about suspensions that occur at lower levels? There can be e.g. the following situations:
-
Some (but not all) of the workers in a task part are suspended: either because of administrator’s action or because of some unhandled fatal error. The task itself continues running, so there’s no need to report the state as anything other than "running" (maybe with additional information that the running capacity is reduced).
| There are some interesting questions: What if a node goes down? Worker tasks bound to that node will be stuck in suspended or runnable state (depending on the setup). Also, what if a worker task encounters a fatal error (like a misconfigured resource)? Should it suspend, hoping that all other workers will suspend as well? |
-
All workers in a task part are suspended. The global task execution is therefore halted (assuming there is no parallel execution of parts). We should report this somehow.
Maybe we could introduce some extra states?
| State | Description |
|---|---|
Running (reduced) |
The global task, task part, or even worker task runs at a reduced speed, because some of the worker tasks or worker threads are suspended or has died. |
Halted |
The execution of the global task, task part, or worker task was halted because all the worker tasks or worker threads are suspended or has died. |
These states are actually the same as the "running" state. They are only a kind of indication that there’s a condition that prevents the full speed of the execution. After the condition is over, the task/part state is shown as "running".
TODO think about this
Progress reporting
Requirements
It should be shown how much work has been done, and how much is yet to be done. Time per item, throughput, and estimated completion time should be visible.
For tasks that run for hours or days it is crucial to see where we are on the road, and how long that road is.
Current state
There are several progress and performance indicators, e.g.
-
"progress" vs "objects processed" vs "percent complete",
-
"average time" vs. "wall-clock average time".
These are sometimes imprecise, or even outright conflicting. Estimated completion information is missing. It is often not clear which counters are reset on task re-execution (e.g. for live sync or async update tasks) and which are not.
Task parts progress
Task progress
A reasonable way of displaying task progress looks like this:
| Task | Metric | Example (long form) | Example (short form) |
|---|---|---|---|
Single part, more buckets |
Bucket percentage |
10% (25 of 256) |
10% |
Single part, single bucket |
Objects percentage |
10% (2500 of 25000) |
10% |
Multiple parts, more buckets |
Bucket percentage |
10% in part 2 of 3 |
10% in 2/3 |
No total known |
Objects processed |
2500 |
2500 |
Estimated time to complete
Given t (processing time) and pc (percent complete) we can calculate estimated time to complete ttc as
100%
ttc = t x ( ------ - 1 )
pc
(assuming 100% >= pc > 0, t > 0)
The problem is that if the task was suspended and resumed, the t cannot be computed simply as "current time - start time". We have to know the real ("net") processing time.
Another issue is that for multi-part tasks (like reconciliation) we can estimate the time-to-complete only for the current part. Normally, this shouldn’t be a big problem, because the most prominent multi-part task is the reconciliation, and it has almost empty first part, significant second one, and almost empty third one.
Error reporting
Requirements
Failures inevitably occur. They are not only caused by configuration issues, but often by external factors: wrong data, infrastructure outages, and so on. Failures and their effects have to be diagnosed and fixed quickly, and without inappropriate effort.
Current state
There are some mechanisms for error reporting: audit records, operation execution records, iterative task information, operation result. They sometimes complement each other, sometimes they overlap, often leading to inconsistent overall view.
See:
-
MID-4832 (still relevant?),
-
MID-4991,
-
…
The processing of objects goes through the following main phases. Let us deal with tasks that operate on resource objects, because their processing is the most complex. (For repository objects, phases of provisioning and synchronization service processing are skipped.)
| Phase | Description |
|---|---|
Provisioning (preprocessing) |
A ConnId object is converted into midPoint resource object, a shadow is found and updated (or not found and created). After this phase an object is presented to the processing task. |
Synchronization service |
A resource object is matched against synchronization rules. This includes looking up object owner. An appropriate action is selected. |
Clockwork processing, part 1: Projector |
Here midPoint computes changes that are to be applied to the focal object and to the projections. |
Clockwork processing, part 2: Change execution |
Computed changes are applied. |
Embedded clockwork execution |
During clockwork processing it is possible that a more or less related clockwork run is started. This occurs typically as a result of handling errors during change execution (like "object already exists"). But it can be also because of on-demand assignment target creation, policy rules execution, and so on. |
Current state
Currently we have the following error reporting mechanisms:
| Mechanism | Description | Covers |
|---|---|---|
Audit |
Any operation in the clockwork is audited: both at the beginning ("request") and at the end ("execution"). The user can then display e.g. all executions in the last 24 hours that resulted in an error. |
Clockwork only |
Operation execution records |
Any midPoint object keeps a list of N last operations executions, including related task OID and the result status. This allows midPoint to display all objects that failed to be processed by a task.[11] |
Clockwork only |
Iterative task information |
Iterative task handlers record the information on objects processed (including final status) into the task. These information are not detailed, though. Only the number of failed objects and the last object identification are recorded. As a hack, information about last 30 failed objects are written to the operation result upon task completion. |
Task operation |
Operation result |
Contains detailed information about failed operations. Unfortunately, these information are summarized because of space constraints, so they are not usable for later diagnostics. |
The whole operation |
The current state of error reporting mechanisms is like this:
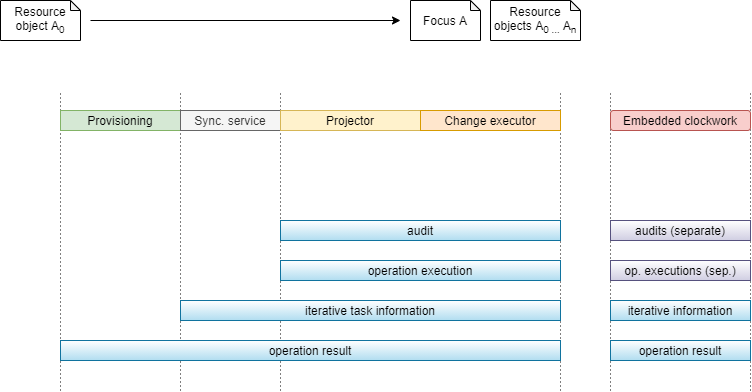
As we can see, audit and operation execution do not cover errors occurring in provisioning or synchronization service. Moreover, they are written separately for each embedded clockwork operation.
Iterative task information does not record each failed object. On the other hand, it covers the synchronization service processing, and also all embedded clockwork executions.
The operation result covers all parts of the operation, but it is not suitable for comprehensive error reporting because of the summarization. Moreover, errors occurring during provisioning pre-processing are in a different parts of the operation result tree than the errors occurring in the synchronization service and clockwork components.
The way forward
The audit and operation execution recording are good mechanisms. But they need to be extended to cover also provisioning pre-processing and synchronization service phases of the process.
We should start with the operation execution records. They should be written not only by the clockwork but also by the task handler involved. The details have to be thought out.
As for the audit records, the errors in provisioning and synchronization service do not match well the existing "request-execution" style of auditing. So, most probably, the audit will not catch these errors in the near future.
The iterative task information will need to be extended to cover provisioning pre-processing, but it will - most probably - maintain only statistical information (# of failures, last failed object). After operation execution is fixed, we will remove "last 30 failed objects" hack from this data structure.
Finally, the operation result can stay as it is. It will have no role to play for routine error reporting. (But for diagnostics of unusual errors it will be probably the first choice.)
Other statistics
Performance information
Information about processing individual objects are captured in the iterative task information structure. Unfortunately, they cover only the "Processing" part here:
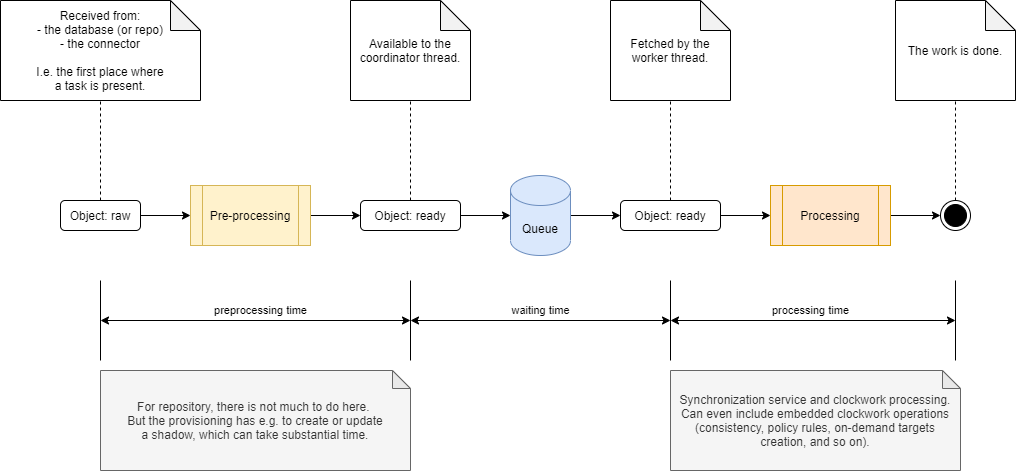
So, pre-processing time (and events) nor waiting time is not accounted for.
This would not be a big problem, if we did not present this information to the user. However, if we do so (as we do now), the information should be more precise. So it should contain both pre-processing and waiting time.
A similar situation is related to the number of objects. If an object fails to be processed during pre-processing phase, it is not covered among successes nor among the failures.
Actions executed information
A very similar situation is with "actions executed". These do not cover actions that are done in pre-processing phase. On the other hand, it is questionable if such actions (like updating a shadow) should be counted. From the user point of view, they are irrelevant. The actions executed was created for a user to see the real effects of a task or an operation.
Environmental performance information
TODO
Synchronization states
TODO
Miscellaneous Ideas
Default Task Handlers
COORDINATOR task
We can stop using http://midpoint.evolveum.com/xml/ns/public/task/workers-creation/handler-3. Instead, we will use the native handler. The task manager will automatically redirect the processing to the workers' creator handler.
PARTITIONED_MASTER
The handler URI vs. task kind information is redundant here.
So we can redirect a task with standard reconciliation handler and kind=PARTITIONED_MASTER to the partitioned reconciliation handler.
We can do the same to a task with partitioned reconciliation handler but with undefined kind.
Pre- or Post-Processing
E.g. to execute a bulk action before or after specified part.
Main task could be e.g. recomputation, or even iterative bulk action task. But we might want to execute auxiliary bulk action before or after the main processing. Maybe even to pass some data between the parts?
Ad-hoc multi part tasks?
Same handler? Even different handlers, covered under lightweight part creator?
1. This is a preliminary term. In previous versions of midPoint we used the word partition but it has a meaning colliding with the domain of databases.
2. The action includes options that determine how exactly is the action executed. Examples of such options are dry run, simulation, or real execution.
3. Although it is technically possible to execute parts in parallel, it should be done only if the consequences of doing so are well understood.
4. See RequestsBuffer class
5. If we had a situation in which change ordering is not important, we could start multiple worker tasks against the same asynchronous update source, e.g. JMS queue. The usual JMS mechanisms for load distribution would ensure distribution of change messages to these worker tasks. Unfortunately, message ordering is almost always important.
6. Assuming suspension "from the top" i.e. that an administrator suspends the whole processing.
7. One or more buckets. If a single bucket, then the first metric makes no sense, and the second and third metrics are the same.
8. Knowing the total requires additional
countObjects operation for each bucket.
9. Knowing the total requires additional large
countObjects operation that might take a substantial time.
10. No buckets available. Or this can be seen as a single-bucket case.
11. There are two kinds of errors shown here: errors occurring during a target resource object operation (e.g. when adding, modifying, or deleting an account), and general errors occurring during clockwork processing. Currently, we do not distinguish between these two kinds. Both are recorded in respective objects in the same way. TODO: describe this in more details.
Was this page helpful?
YES
NO
Thanks for your feedback